Setting EKF2 Estimator for MOCAP Fusion
- First choose
ekf2 as your estimator from the System tab
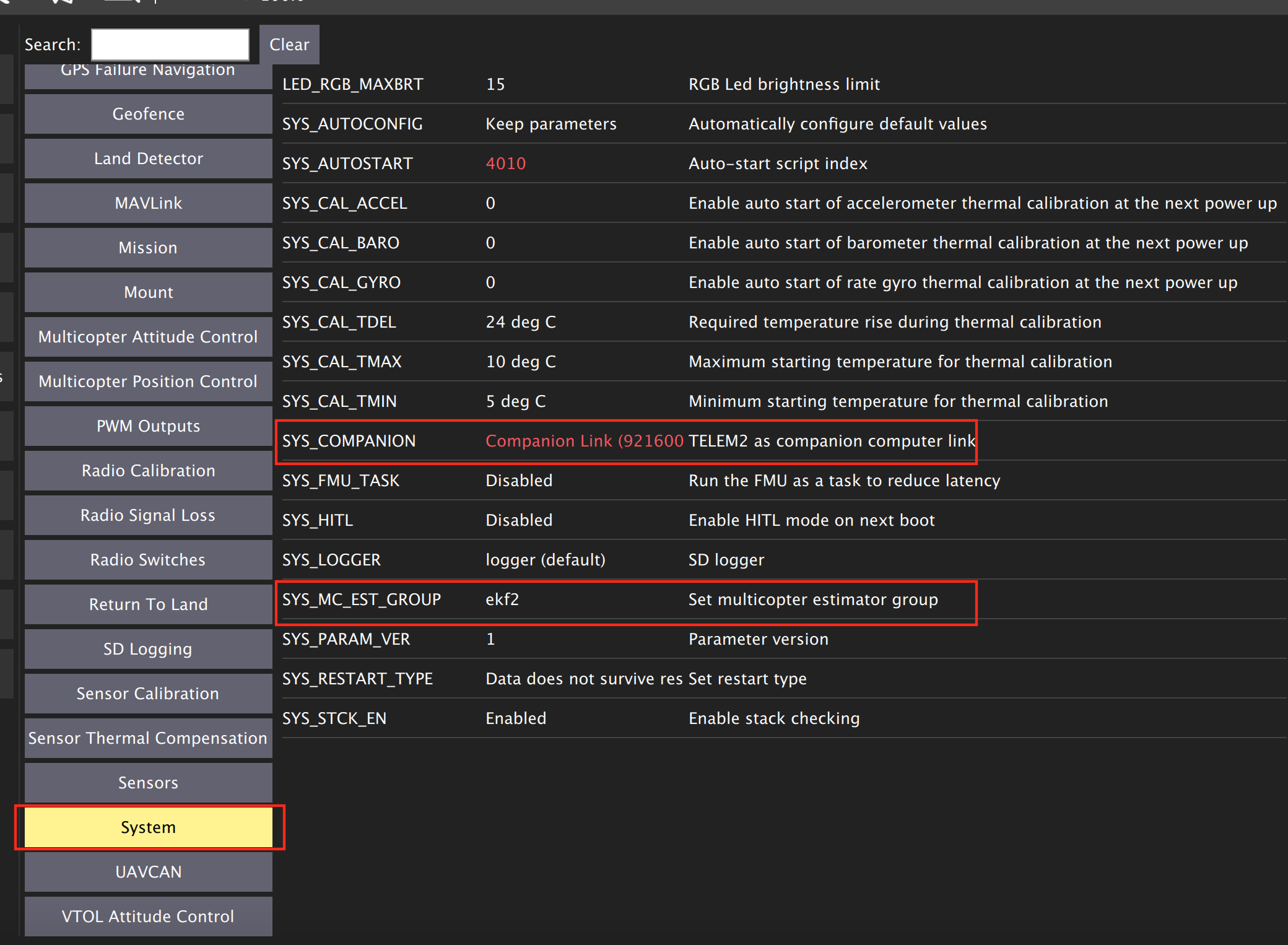 also make sure the you set the baudrate correctly
also make sure the you set the baudrate correctly SYS_COMPANION
- In the
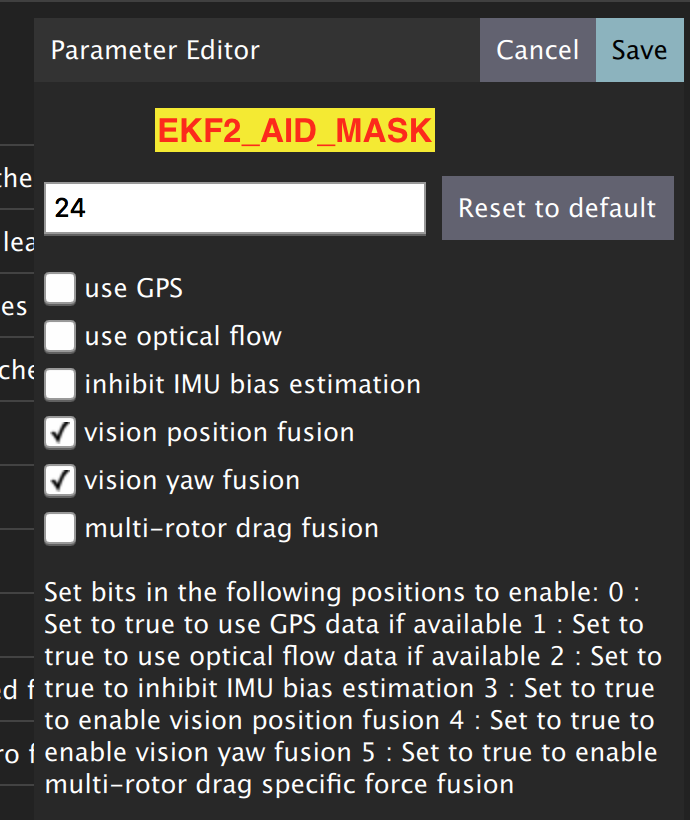
EKF2 parameters tab, set EKF2_AID_MASK to not use GPS, and use vision position and yaw.
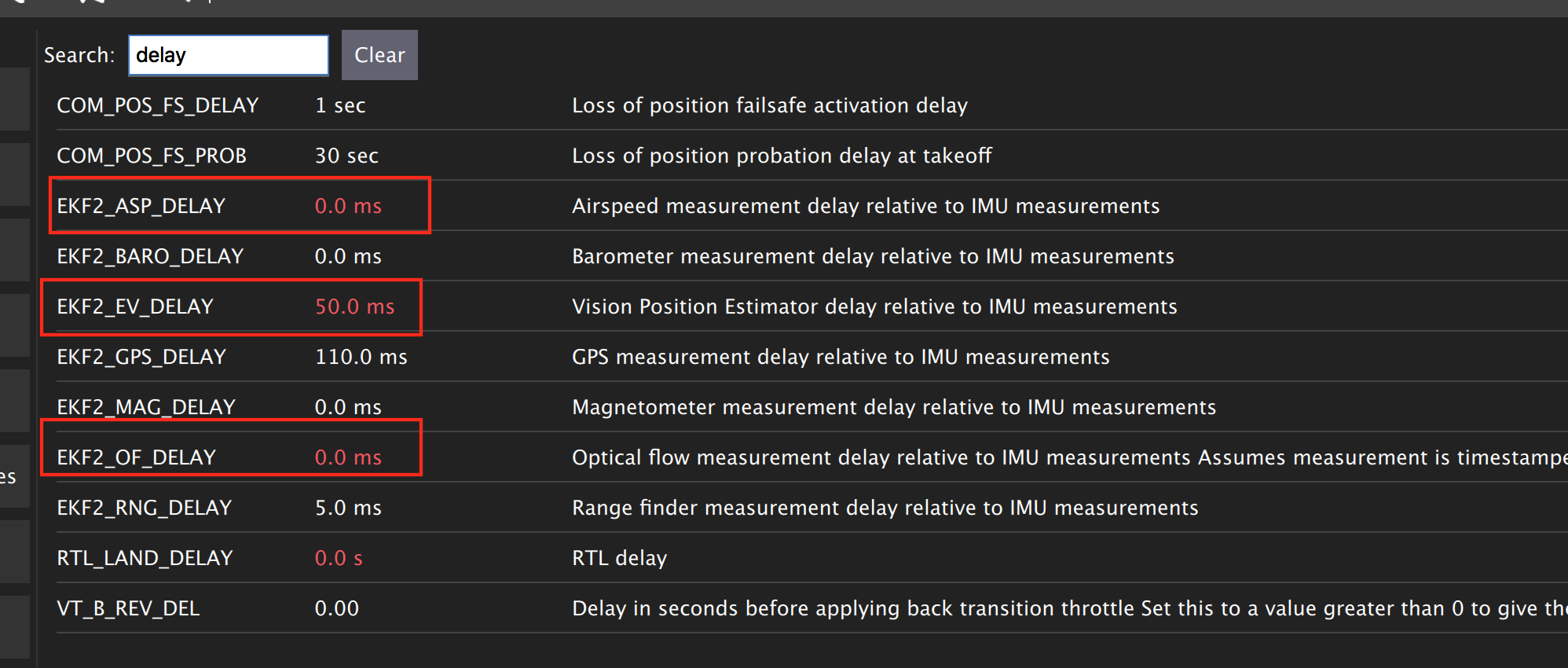
- There are some delay parameters that need to set properly, because they directly affect the EKF estimation. For more information read this wiki
- choose the hight mode to be vision

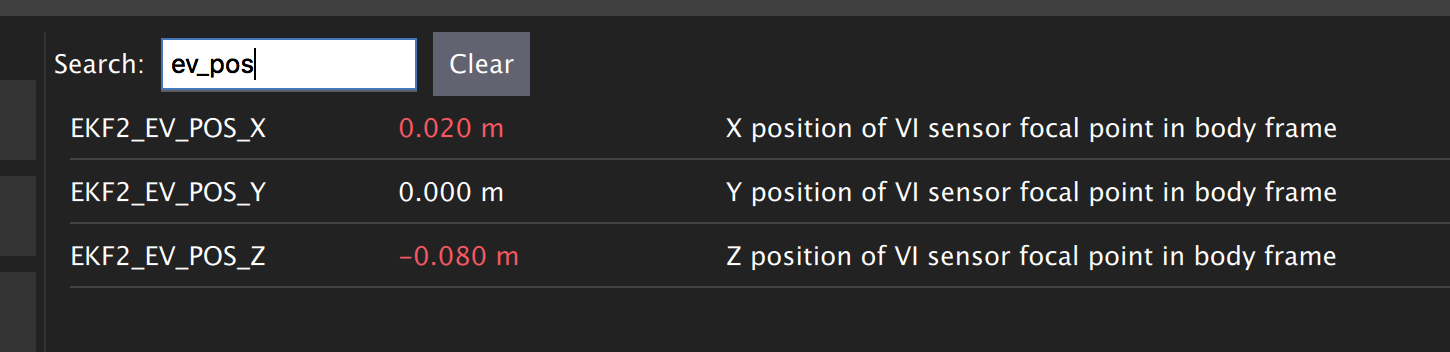
- Set the position of the center of the markers (that define the rigid body in the mocap system) with respect to the center of the flight controller. +x points forward, +y right, +z down